
Kosketukseton pyörien suuntausjärjestelmä, joka käyttää konenäköä ja infrapunavaloa 3D-skannauksessa:
CEMB ARGOS -pyörien suuntausjärjestelmä
Viimeisen 25 vuoden aikana pyörien suuntauslaitteet ovat kehittyneet hyödyntämään kameranäköä ja pyöriin kiinnitettäviä kohdetauluja. Kehityksen alusta lähtien ala on pyrkinyt saavuttamaan läpimurtoja kohti kosketuksetonta mittausta, joka mahdollistaa mittaamisen ilman pyöriin kiinnitettäviä laitteita ja poistaa näin kohdekiinnikkeiden aiheuttamat haitat: kiinnitykseen kuluva aika, vanteiden vahingoittuminen, vanteiden muotojen yhteensopimattomuus ja mittausvirheet kiinnitysheiton vuoksi.
Tämä artikkeli selittää toimintaperiaatteet ja teknologian, joka on asettanut uuden standardin ajan säästämisessä ja tuottavuudessa: Auraus- ja camber-kulmien mittaaminen vie vain 5 sekuntia. Ei kohdetaulujen asennusta. CEMB on nimennyt uuden laitesarjan ARGOSiksi kreikkalaisen mytologian tuhannen silmän jumalan mukaan.
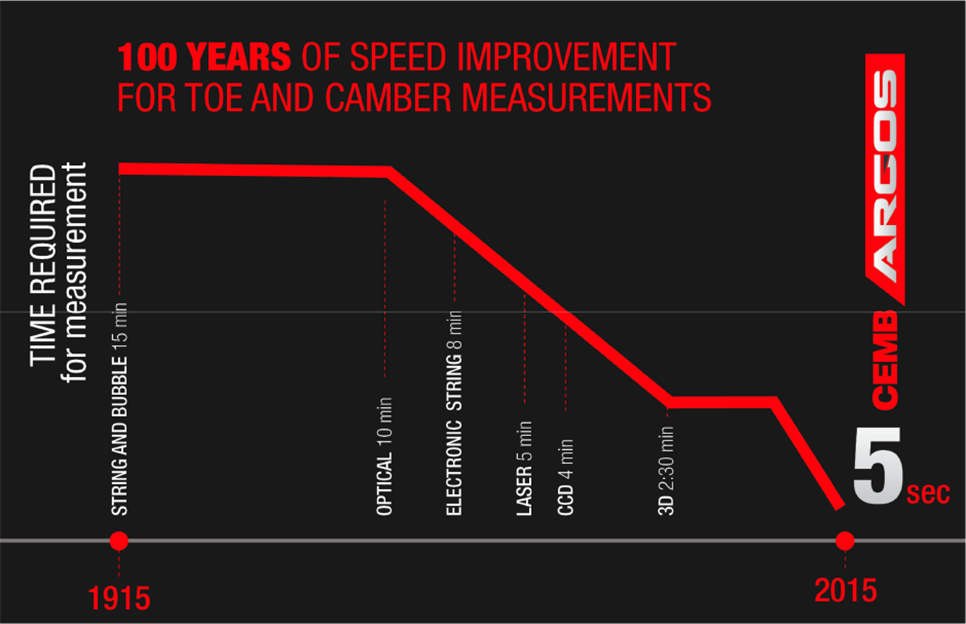
Auraus- ja camber-mittausten
kehitys viime vuosisadalla
Ei tuhatta silmää mutta niiden sijaan digitaaliset kamerat ovat laitteiston ydinosa, ne mahdollistavat auraus-, camber- ja muiden ajoneuvon geometristen kulmien mittaamisen pelkästään näkemällä pyörät ilman fyysistä kosketusta. Jokainen kamera tekee saman työn kuin uusimman teknologian älypuhelimien tai ihmisen silmät: luo kaksiulotteisen (2D) kuvan, jota kutsutaan “kuvaksi”, kolmiulotteisesta maailmasta, jota se katsoo.
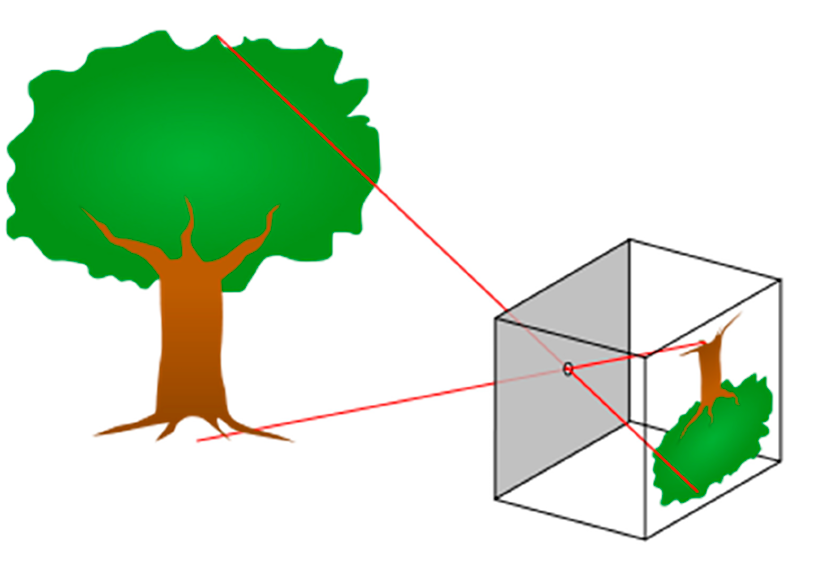
Silmien ja kameroiden toimintaperiaate on
sama, valo kolmiulotteisesta maailmasta
kulkee pienen aukon läpi ja kuvaa 2D-kuvan
silmän verkkokalvolle tai kameran sensorille.
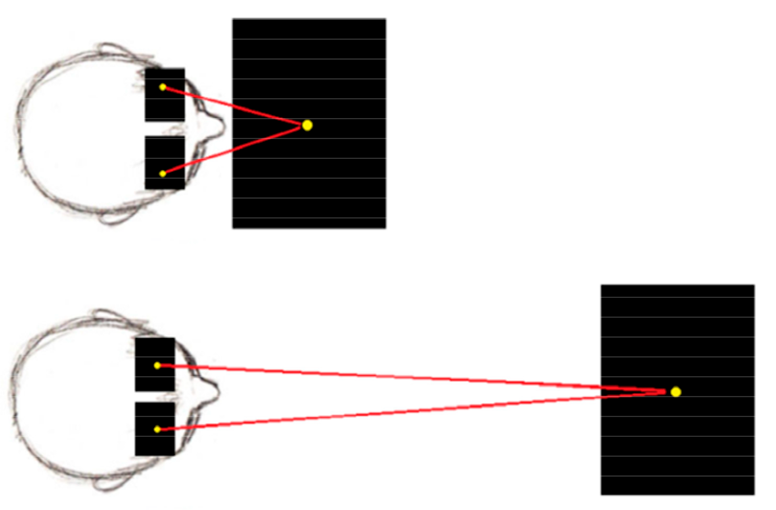
Yksittäinen kuva ei ole riittävä mittaamiseen, koska se on litteä kuva. Se on syvyyttä vailla oleva esitys maailmasta. Miten syvyys saadaan takaisin? Luonto on antanut ihmisille jo ratkaisun: kaksi silmää, jotka ovat hieman erillään toisistaan ja luovat kaksi kuvaa maailmasta hieman eri perspektiivistä ja aivot pystyvät yhdistämään nämä kuvat muodostaakseen kolmiulotteisen havainnon ympäröivästä maailmasta.
ARGOS käyttää samoja periaatteita. Kameroiden pareja kootaan rakenteiksi, joita kutsutaan “skannereiksi”, skannerit pitävät jokaisen kameraparin kiinteässä ja hieman erillisessä asennossa. Tietokone määrittelee kunkin skannerin kuvat ja laskee katsomansa kohteen syvyyden.
Ihmisen aivot osaavat luonnostaan laskea syvyyden, niin että havaitsemme maailman kolmiulotteisesti, emmekä ole tietoisia jokaisen silmämme tuottamista 2D-kuvista.
ARGOS opetetaan oppimisprosessin kautta. Oppitunteja tehdään jokaisen skannerin tuotannon aikana, ja tuloksena on joukko dataa, jota kutsutaan “skannerikalibroinniksi”. Tämä on spesifinen jokaiselle skannerille ja mahdollistaa syvyyden laskemisen skannerin ottamista kuvista.
Jos yksinkertaisen pienen valonlähteen sijaan mustalla taustalla katsomme laajempaa kohdetta, jolla on laaja valoisuuden vaihteluväli, kuten pyöriä tai ajoneuvon osaa, ARGOS määrittää kohteen kolmiulotteisen geometriaan samalla periaatteella. Jokainen pieni osa kohteesta toimii pienenä valonlähteenä, jonka etäisyys lasketaan. Kohteen kolmiulotteinen geometria muodostuu sen jokaisen pienen osan kolmiulotteisten sijaintien yhdistelmästä.
Kolmiulotteisen pyörän geometrian
kuvaus on jokaisen sen pisteen
3D-sijaintien yhdistelmä.
Pienen valonlähteen havaitseminen mustalla taustalla on yksinkertaista, koska valon intensiteetin vaihtelu on merkittävä havaitun pisteen (valonlähde) ja sitä ympäröivien pisteiden (musta tausta) välillä. Jos sen sijaan kohteen heijastaman valon intensiteetti on sama, kahdessa kuvassa olevien kohteen vastaavien osien havaitseminen voi olla vaikeampaa.
Ihmissilmät ovat erittäin herkkiä valon vaihtelulle; emmekä juurikaan koe tätä ongelmaa. On kuitenkin olemassa olosuhteita, joissa valon intensiteetti on erittäin tasaista, kuten sumuisena päivänä, jolloin maassa on lunta, missä syvyyshavainnot kärsivät suuresti.
Kamerat ovat paljon huonompia kuin ihmissilmät valon vaihtelun havaitsemisessa, ja jopa renkaan sivu normaalissa ympäristön valossa voi olla riittävän tasainen valon intensiteetiltään aiheuttaakseen epätarkkuutta syvyyshavainnoissa.
Koneen “silmät” tai kamerat tarvitsevat apua. Tämä apu tulee infrapunavaloprojektoreista, yksi jokaiselle skannerille, jotka pystyvät projisoimaan kuvion tummista ja vaaleista alueista pyörän päälle, lisäten siten tarvittavaa valon vaihtelua syvyyden havaitsemiseksi oikein.
Laitetta käytettäessä tätä valokuviota ei näy.
Syynä on se, että pyörälle projisoitu valo on infrapunavaloa, joka on näkymätöntä ihmisen
silmille, mutta täysin näkyvää skannerin
parituille “silmille”.
Yhteenvetona ja kertauksena, Argos-pylvään sisällä on kaksi kameraa koottuina skanneriksi, infrapunavalokuvion projektori ja tietokone, joka pystyy laskemaan syvyyden kameroiden kuvista ja tehtaalla ohjelmoidusta skannerikalibroinnista. Tällaista laitetta kutsutaan teollisuudessa “strukturoituun valoon perustuvaksi 3D-skanneriksi”.
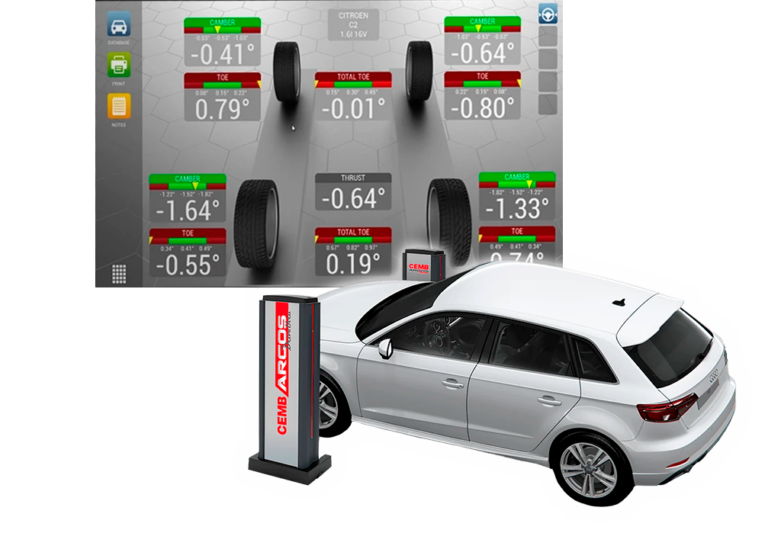
Neljä pylvästä, yksi jokaiselle pyörälle, mittaavat ajoneuvon pyörien kolmiulotteisen geometrian, eli niiden sijainnit avaruudessa, ja näistä sijainneista lasketaan perinteiset suuntausmittaukset, mukaan lukien auraus, camber, caster, akseliväli, erikohtaisuus ja kaikki muut arvot.
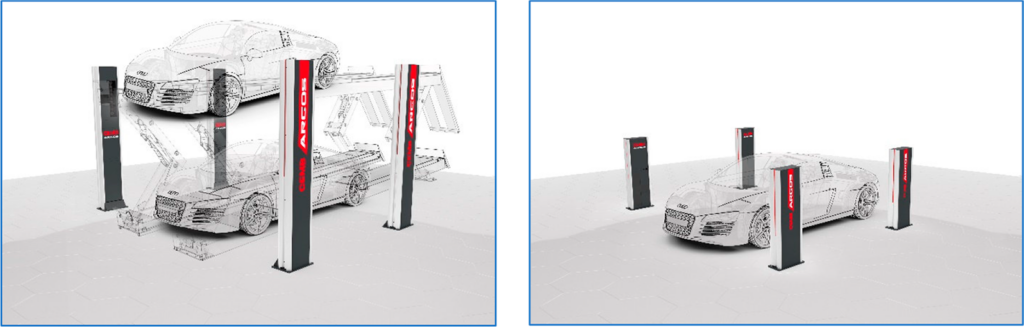
Kaksi ARGOS-asennustapaa
Jokainen pylväs mittaa pyörän sijainnin suhteessa itseensä, mutta pyörän suuntauskulmien laskemiseksi pyörän sijainti on tiedettävä suhteessa myös muihin pyöriin. Esimerkiksi etuosan kokonaisauraus riippuu kahden etupyörän suhteellisesta suuntauksesta, tai etupyörien on oltava suorassa suhteessa takapyörien kulkukulmaan.
Kuinka tämä saavutetaan? Pyörien välinen suuntaus saavutetaan tietämällä pylväiden sijainti suhteessa toisiinsa. Esimerkiksi etuosan kokonaisaurauksen laskemiseksi, jos vasen etupylväs mittaa vasemman etupyörän sijainnin suhteessa itseensä, ja vasemman etupylvään sijainti suhteessa oikeaan etupylvääseen tiedetään, on mahdollista laskea vasemman etupyörän sijainti suhteessa oikeaan etupylvääseen.
Koska oikean etupyörän sijainti mitataan suhteessa oikeaan etupylvääseen, on mahdollista laskea vasemman etupyörän sijainti suhteessa oikeaan etupyörään, ja lopulta laskea etupyörien kokonaisauraus.

Neljän pyörän kolmiulotteisen
geometrian kuvaus, jokainen
tunnetaan suhteessa toisiinsa.
Pylväiden sijainnin mittaamisprosessia suhteessa toisiinsa kutsutaan “automaattiseksi itsekalibroinniksi” ja se tapahtuu aina, kun ajoneuvo on pois tieltä ja skannerit voivat nähdä toisensa.
Jokainen pylväs mittaa vastakkaisten kahden pylvään sijainnin skannereissa olevien harmaiden ympyröiden avulla, ja tuloksena oleva suhteellisten sijaintien joukkoa kutsutaan “neljän pylvään kalibroinniksi”.
Kun ajoneuvo ajetaan skannereiden väliin, kalibrointi pysyy muuttumattomana, koska pylväät ovat kiinteillä paikoillaan. Automaattisen itsekalibroinnin toistaminen jokaiselle ajoneuvolle mahdollistaa pienten, pitkän aikavälin pylväiden liikkeiden kompensoinnin, johtuen lämpömuodonmuutoksista lämpötilan vaihteluiden tai alustan liikkeen vuoksi.
JOHTOPÄÄTÖS
- ARGOS on uusin kosketukseton pyörien suuntausjärjestelmä, joka hyödyntää viimeisintä konenäön rakenteellista valoa 3D-skannauksessa neljässä kiinteässä pylväässä tarjoten ennennäkemätöntä ajan säästöä pyörien suuntauspalvelussa: 5 sekuntia auraus- ja camber-mittausten ottamiseen.
- Ei asennusta tai pyöriin kiinnitettäviä kohdetauluja, ei edestakaisin kävelyä
- Ei tarvetta poistua ajoneuvosta lukemien saamiseksi,
- Ei vanteiden vaurioita, vanteiden muotojen yhteensopimattomuutta, mittausvirheitä kiinnikkeiden heiton vuoksi.
- Ei liikkuvia osia, jotka kuluisivat tai löystyisivät aiheuttaen mittausvirheitä.
- Automaattinen itsekalibrointi varmistaa mittauksen vakauden päivä- ja yölämpötilan sekä vuodenaikojen lämpötilan vaihteluissa.

CEMB Argos kulutuspintaskannerilla ja nostinversiona
Lisätietoa: myynti@suomentyokalu.fi